

Обзор модулей FIO KUHNKE и возможности их применения
На рынке средств промышленной автоматизации, уже давно существуют системы контроля и исполнения, которые представляют собой модульные системы. В данной статье мы рассмотрим модульную систему FIO от компании KUHNKE, которые работают на широко распространённой среде программирования CODESYS V3 и имеют все необходимые расширения, для проектирования и разработки АСУ ТП.
Kuhnke FIO представляет собой систему модулей ввода-вывода для соединения сигналов процесса в сети EtherCAT.

Основным компонентом модульной системы является Kuhnke FIO Controller 116, который представляет собой мини-IPC на базе ARM плюс ПЛК CODESYS. Процессор i.MX6 SoloX Freescale 1 GHz обеспечивает высокую производительность и низкое энергопотребление. Решает сложные вычислительные задачи в области ресурсоёмких мультимедийных приложений. В качестве операционной среды используется RTLinux. Для обеспечения хранения технологических и других данных, а также для обмена управляющими программами имеется слот для SD-карты и USB порт. Цифровой вход прерывания позволяет контроллеру немедленно реагировать на события процесса. На одной стороне модульного блока управления находится разъем E-bus, который обеспечивает гибкое расширение с помощью модулей ввода/вывода EtherCAT серии FIO от Kuhnke. Кроме того, есть возможность использовать модуль расширения, если вы хотите активировать внешние ведомые устройства EtherCAT.
Контролер обеспечен интерфейсами с разделением потенциалов: 1х Ethernet 100 Мбит – RJ45, 1х CAN и без разделения потенциалов: 1 x RS232, 1 x USB 2.0 Host, 1 x EtherCAT E Bus
Полевые шины: CANopen® Master, EtherCAT® Master via E-bus system plug Modbus RTU Master, Modbus TCP Master
Имеются следующие расширения конфигурации контролера:
Расширение PROFINET IO
2x Ethernet (коммутатор) PROFINET® с полевой шиной PROFINET IO Device (256 байт на входе/ 256 байт на выходе)
Расширение EtherCAT Slave
2x EtherCAT (вход/выход) с полевой шиной EtherCAT Slave Device (256 байт на входе/ 256 байт на выходе)
Расширение Ethernet
2x Ethernet (коммутатор) 10 Мбит, 100 Мбит
CODESYS расшифровывается как Controller Development System — это программная платформа, предназначенная для решения многих задач технологии промышленной автоматизации. Она основана на системе программирования МЭК 61131-3 (IEC 61131-3). Инструмент предоставляет пользователям интегрированные решения, адаптированные к их практической работе и направленные на предоставление практической поддержки при выполнении любых задач.
CODESYS поддерживает все пять языков, указанных в МЭК 61131-3:
- IL (Список инструкций)
- ST (Structured Text), основанный на PASCAL для структурированного программирования
- LD (лестничная диаграмма)
- FBD (схема функциональных блоков)
- SFC (последовательная функциональная схема)
Помимо стандартных языков IEC, CODESYS также поддерживает:
- CFC (Continuous Function Chart) — это редактор FD (функциональных схем) с полностью настраиваемым графическим макетом: в то время как редакторы FD основаны на сети и автоматически размещают функциональные блоки, CFC позволяет пользователям размещать блоки в любом месте, чтобы можно было создавать эффекты обратной связи. без каких-либо временных переменных.
Система программирования CODESYS позволяет напрямую конфигурировать полевые шины CANopen и EtherCAT. Стеки протоколов могут быть установлены отдельно в виде библиотек CODESYS для некоторых систем.
Kuhnke Controller 116 можно заказать с предустановленными расширениями:
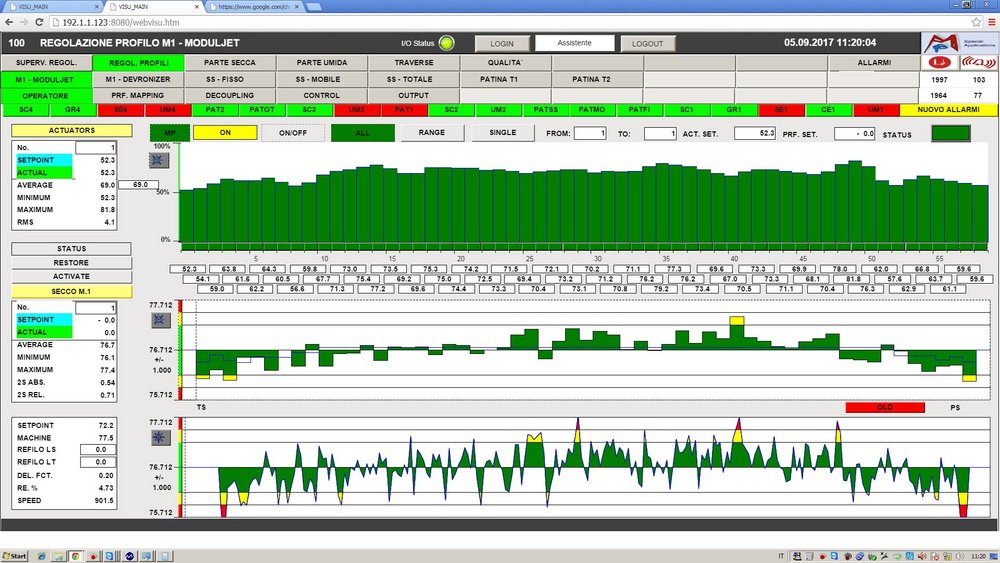
CODESYS WebVisu - позволяет отображать собственные экраны, созданные в CODESYS, в любой среде веб-браузера в любой точке мира.
CODESYS SoftMotion – дает возможность использовать стандартный интерфейс разработки IEC 61131-3 для планирования одно- или многоосевых перемещений вплоть до построения кривых включительно — вместе с логическим приложением.
CODESYS SoftMotion содержит:
• Сертифицированные программные модули PLCopen для одно- и многоосевых перемещений
• Сертифицированные программные модули PLCopen для дополнительных функций, таких как диагностика, остановка, CAM-контроллер
• Дополнительные POU для различных задач, таких как мониторинг динамических данных или ошибка следования, работа с CAM и CAM-контроллерами.
• Шаблоны визуализации для быстрого и простого ввода программных модулей с помощью визуализации CODESYS.
• Элементы визуализации, которые позволяют изменять CAM и контроллеры CAM в режиме онлайн.
• Встроенный графический CAM-редактор с широкими возможностями настройки
• Поддерживаются виртуальные и логические оси
• Интегрированные драйверы для многочисленных приводов CAN, CANopen® и EtherCAT®
• Конфигурация приводов как стандартных полевых устройств
• Примеры проектов CODESYS SoftMotion
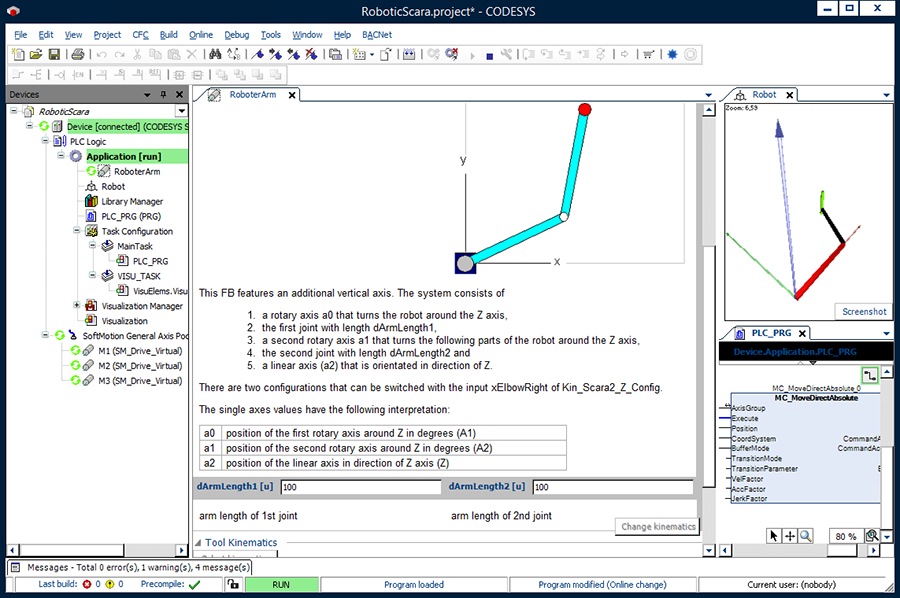
CODESYS SoftMotion CNC+ Robotics - предоставляет редактор как удобный способ настройки управления движением 3D-CNC и сложных групп осей робота. Полный набор функций, включая интерполятор и кинематические преобразования. Работать в нем довольно просто - запустите редактор, выберите подходящую кинематику, задайте ее параметры и привяжите к физическим осям робота. Стандартные функциональные блоки обрабатывают функции робота в соответствии с PLCopen MotionControl Part 4.
Комплект поставки и производительность CODESYS SoftMotion CNC+Robotics
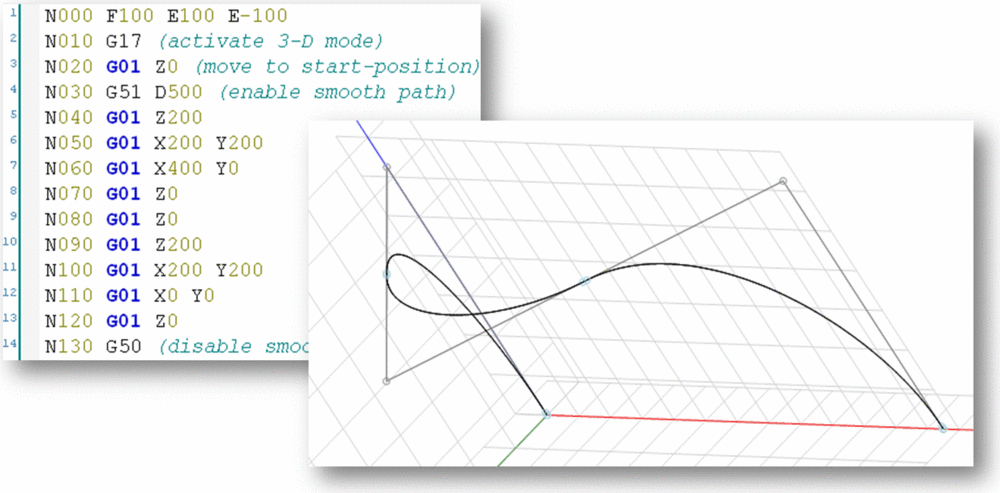
CNC
• 3D-редактор ЧПУ согласно DIN 66025 (код G) для планирования и представления движения с параллельным текстовым и графическим отображением и импортом DXF• Библиотека CODESYS CNC со всеми функциональными блоками для редактирования ЧПУ
• Пример применения 3D-движения ЧПУ с учебным пособием
• Комплексные функции интерполяции от линейной до сплайновой интерполяции
• Функции обработки пути, в т.ч. компенсация радиуса инструмента, подавление петель и скругление углов
• Шаблоны визуализации для быстрого и простого ввода в эксплуатацию всех функциональных блоков в CODESYS Visualization
• Элемент визуализации для онлайн-отображения и управления 3D-путями, например, в качестве операционного блока в станках с ЧПУ
• Поддержка виртуальных и логических осей
• Интегрированные драйверы для многих приводов CAN, CANopen® и EtherCAT®
• Конфигурация приводов как безопасных полевых устройств
Robotics
• Удобная параметризация групп осей для предопределенной кинематики в отдельном конфигураторе
• Интегрированное планирование движения со значениями координат для положений робота в различных системах координат
• Функциональная библиотека с программными блоками в соответствии с PLCopen Motion Part 4, такими как MC_GroupEnable/Disable/Reset/ReadError, MC_MoveDirectAbsolute, MC_MoveDirectRelative, MC_GroupHalt, MC_GroupStop, MC_TrackConveyorBelt и MC_TrackRotaryTable
• Многочисленные поддерживаемые кинематики с удобной конфигурацией, например, различные портальные роботы (2/3/5 осей), роботы-сошки/штативы и роботы SCARA.
• Дополнительная кинематика ориентации
• Поддержка инструментов с ориентацией и смещением положения (полный 6D)
Модульная система FIO не ограничивается одними контроллерами, и включает в себя целый ряд модулей, выполняющих различные функции.
Цифровые модули ввода – вывода.
Цифровые модули ввода-вывода Kuhnke FIO передают двоичные сигналы управления и анализируют входные сигналы устройства автоматизации, гальванически отделенные от уровня процесса. Первичная и вторичная стороны модуля разделены оптопарами. Эта гальваническая развязка позволяет отключать питание выходов только через один компонент безопасности. Состояние сигнала каждого канала отображается светодиодами.
Аналоговые модули ввода-вывода
Аналоговый модуль Kuhnke FIO обрабатывает по входным каналам сигналы в диапазоне от 0/4 до 20 мА или 0-..+10 В. Все входы электрически изолированы от главного управления, они оцифровываются и передаются с разрешением 13 бит.
Вывод модуля формирует сигналы на выходных канала в диапазоне от 0/4 до 20/24 мА или от -10/0 до +10 В. Ток или напряжение подается с разрешением 16 бит и гальванически изолированы от процесса управления. Выходные каналы терминала EtherCAT® имеют общий потенциал земли с источником питания 24 В постоянного тока. Диапазон каждого канала можно индивидуально настроить в CODESYS через CoE. Светодиоды, назначенные клеммам, показывают состояние сигналов каналов. Из-за выбранной конфигурации канала количество модулей в системе может быть значительно уменьшено.
Модули ввода температуры (PT / Nİ / TC)
Модули ввода температуры Kuhnke FIO имеют индивидуально программируемые входы конфигурация которых происходит через образ процесса. Температурные входы позволяют напрямую подключать резистивные датчики и термопары. Микропроцессор преобразует линеаризацию во всем диапазоне температур. Для особых требований к температурному диапазону по запросу могут быть предоставлены индивидуальные спецификации. Все входы оцифровываются с разрешением 16 бит и передаются через гальваническую развязку на главный блок управления. Состояние сигнала каждого канала отображается светодиодами, связанными с клеммами. Из-за конфигурации с разделением каналов количество модулей в системе может быть значительно уменьшено.
Модули счетчика-позиции-привода
В данную группу входит четыре модуля:
• Kuhnke FIO Counter2 - Модуль счетчика подсчитывает двоичные импульсы и передает показания счетчика электрически изолированно на главный блок управления. Есть 2 счетчика. Модуль может работать как счетчик A-B-Ref или прямой/обратный счетчик. Можно переключаться между одиночной и множественной оценкой сигналов энкодера. Имеется 8 цифровых входов и два выхода с индикацией управления и состояния через шину. Через соответствующую конфигурацию можно также управлять выходом в зависимости от счетчика. Кроме того, входные сигналы могут использоваться для удаления, инициализации или замораживания показаний счетчика.
• Kuhnke FIO Counter/Posi2 – обладает все теме же характеристиками что и модуль Counter2, но в дополнение имеет два аналоговых выхода -10..+10В 12бит
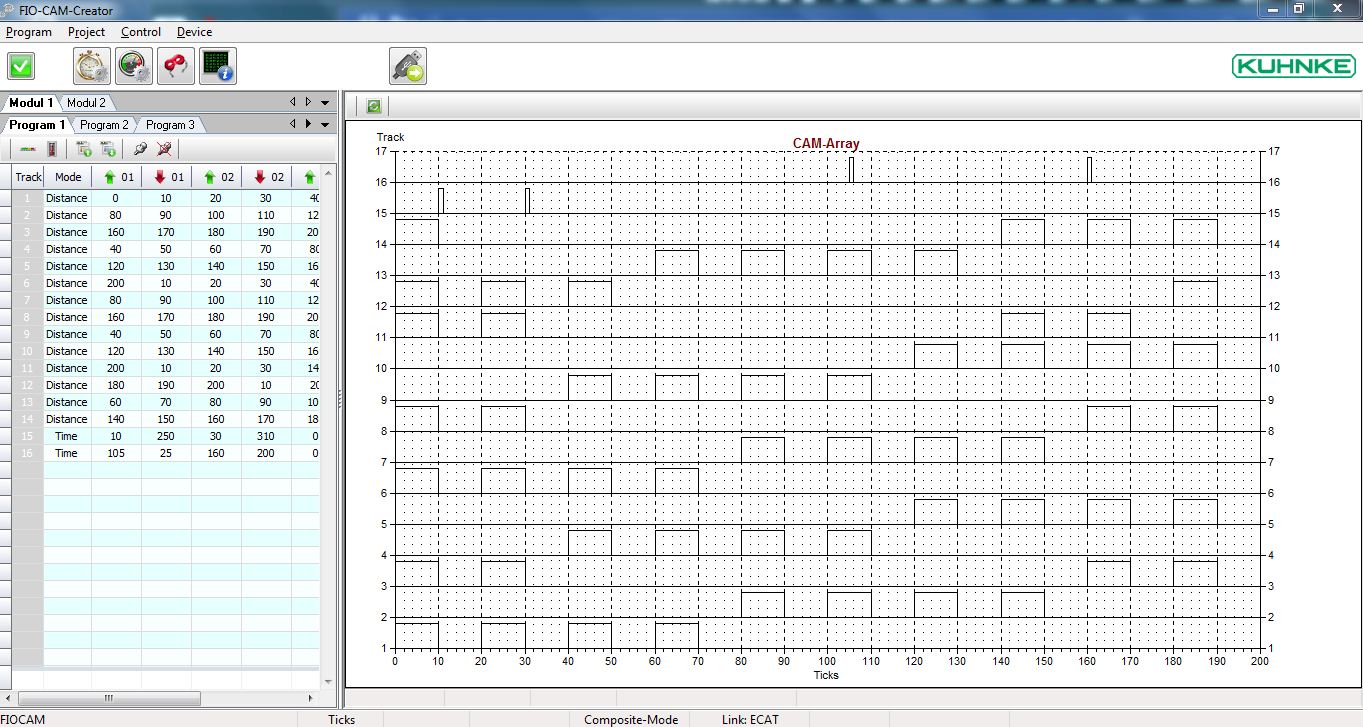
• Kuhnke FIO CAM Control — это системное решение как для автономных, так и для групповых приложений, обеспечивающее быстрое и точное сочетание динамики и эффективного проектирования. Модуль отлично подходит для машиностроения и проектирования специального оборудования, где требуется высокоточный контроль положения исполнительно органа. Вращающийся энкодер передает фактические показания в систему управления Kuhnke FIO CAM Control, которая, в свою очередь, приводит в действие функции машины в соответствии с точностью, кулачки переключателей устанавливаются программой пользователя и учитывают мертвое время по мере необходимости или по желанию. Помимо переключения выходов в зависимости от времени, также можно использовать только один энкодер через EtherCAT® для питания нескольких синхронизированных модулей управления FIO CAM. Конфигурацию функций CAM можно легко выполнить с помощью программного инструмента FIO CAM-Creator.
• Kuhnke FIO Counter-Encoder (CoE) - Помимо 4 аналоговых входов и 4 аналоговых выходов, каждый из которых настраивается по току и напряжению, модуль предоставляет 2 интерфейса энкодера для сбора сигналов инкрементных (HTL/TTL) или абсолютных энкодеров положения с интерфейсом SSI или EnDAT. В качестве альтернативы можно настроить 6 счетчиков событий. Конфигурация в CODESYS осуществляется подключаемыми модулями с соответствующими слотами. Таким образом, каждый слот представляет собой один аналоговый канал или интерфейс энкодера. Эта процедура основана на «профиле модульного устройства EtherCAT».
Модуль Drive Control
Этот чрезвычайно компактный контроллер привода является универсальным решением как для шаговых двигателей, так и для бесщеточных двигателей постоянного тока. Векторное управление, ориентированное на магнитное поле, и обратная связь от энкодера, а также синусоидальная коммутация обеспечивают высокую динамику. Встроенный веб-сервер помогает настроить устройство. Таким образом, очень эффективная, плавная и сбалансированная работа при низком уровне шума, особенно когда речь идет о шаговых двигателях. Шаговые ошибки исправляются уже на пути, а ошибка угла нагрузки устраняется в течение одного полного шага. Благодаря постоянному контролю тока двигателя блок управления обеспечивает ровно столько мощности, сколько необходимо, что делает систему очень энергоэффективной. Напряжение подключения: 12–72 В постоянного тока. Номинальный ток двигателя: 5 А. Режимы работы: Интерполяция (режим циклического синхронного положения), режим самонаведения, режим позиционирования (абсолютный/относительный), режим скорости, режим крутящего момента.
Помимо перечисленных выше модулей, так же имеются коммуникационные модули расширения RS485, RS232, CAN Master/Slave, EthrCAT, модули безопасности и шинные коплеры EtheCAT.